Modelamiento de robot colaborativo Sentinel-V.A
José Luis Huayanay Villar
Centro de Investigaciones de Villa Automation, Huamanga – Ayacucho, Perú
https://doi.org/10.JICAAT/REV-C.2025.001
Revista JICAAT · Vol. 1 · Núm. 1 · 2026
Información del artículo
- Recepción: 02/10/2026
- Aceptación: 22/12/2026
- Evaluado por: Comité Editorial JICAAT
Resumen
Se presenta un modelamiento integral del Robot Colaborativo Sentinel-V.A desarrollado por Villa Automation, orientado a aplicaciones agrícolas, civiles y de vigilancia. El trabajo aborda el análisis cinemático y dinámico del sistema, la implementación del control en tiempo continuo y discreto, y su validación experimental mediante microcontrolador Arduino. El sistema incorpora alimentación fotovoltaica, fusión sensorial y estrategias de seguimiento de trayectoria, constituyendo una plataforma base para robótica móvil autónoma.
Palabras clave
Robot colaborativo, Robótica móvil, Seguimiento de trayectoria, Control automático, Automatización.
1. Introducción
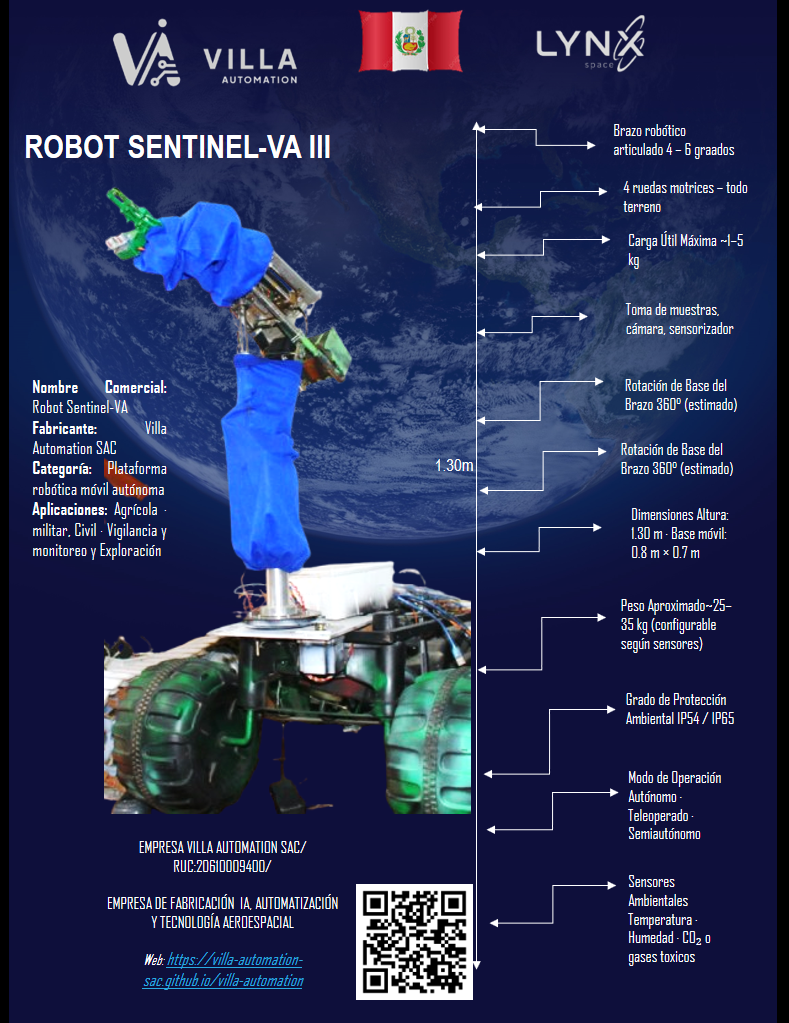
El Robot Colaborativo Sentinel-V.A se concibe como una plataforma robótica móvil terrestre orientada a aplicaciones agrícolas, civiles y de vigilancia, cuyo diseño integra principios de robótica colaborativa, automatización y control avanzado.
Desde el punto de vista cinemático, el Sentinel-V.A se modela como un robot de tracción diferencial, donde el movimiento en el plano depende directamente de la velocidad angular de sus ruedas (Ogata, 1998; Katsuhiko, 2011).
El modelamiento dinámico incorpora efectos físicos reales como masa, inercia rotacional, torque de los motores y fuerzas de fricción, permitiendo diseñar controladores más robustos ante perturbaciones externas.
2. Materiales y métodos
Modelamiento eléctrico del motor DC
La fuerza contraelectromotriz depende de la velocidad angular del rotor y de la constante del motor. Aplicando la ley de Kirchhoff se obtiene el modelo eléctrico del sistema (Åström, 2013).

Seguimiento de trayectoria
Se implementa odometría mediante sensores encoder acoplados a las ruedas del robot, permitiendo estimar la velocidad angular y la posición del vehículo (Nylamp Electronics, 2020).

3. Resultados y discusión
Los parámetros del modelo fueron obtenidos del fabricante y de pruebas experimentales. Se integró un sistema fotovoltaico para la alimentación del robot móvil.
Parámetros del sistema
| Parámetro | Símbolo | Valor | Unidad |
|---|---|---|---|
| Resistencia del inducido | R | 2.6 | Ω |
| Constante de torque | Kt | 0.00767 | N·m/A |
| Relación de engranajes | n | 14 | - |
Conclusiones
El peso estructural del prototipo influye directamente en la autonomía del sistema. Se recomienda optimizar el perfil estructural para mejorar eficiencia energética.
La separación entre la alimentación del sistema de potencia y control garantiza estabilidad eléctrica durante el funcionamiento del robot.
Referencias bibliográficas
- Ogata, K. (1998). Ingeniería de control moderno. Prentice Hall.
- Åström, K. J., & Wittenmark, B. (2013). Computer-controlled systems.
- Gasparetto, A., & Scalera, L. (2019). A brief history of industrial robotics.
- Sarmiento Gamboa, K. S. et al. (2016). Planeación de trayectorias.